A Calibration Scheme for Non-Line-of-Sight Imaging Setups
Jonathan Klein, Martin Laurenzis, Matthias B. Hullin, and Julian Iseringhausen
Abstract
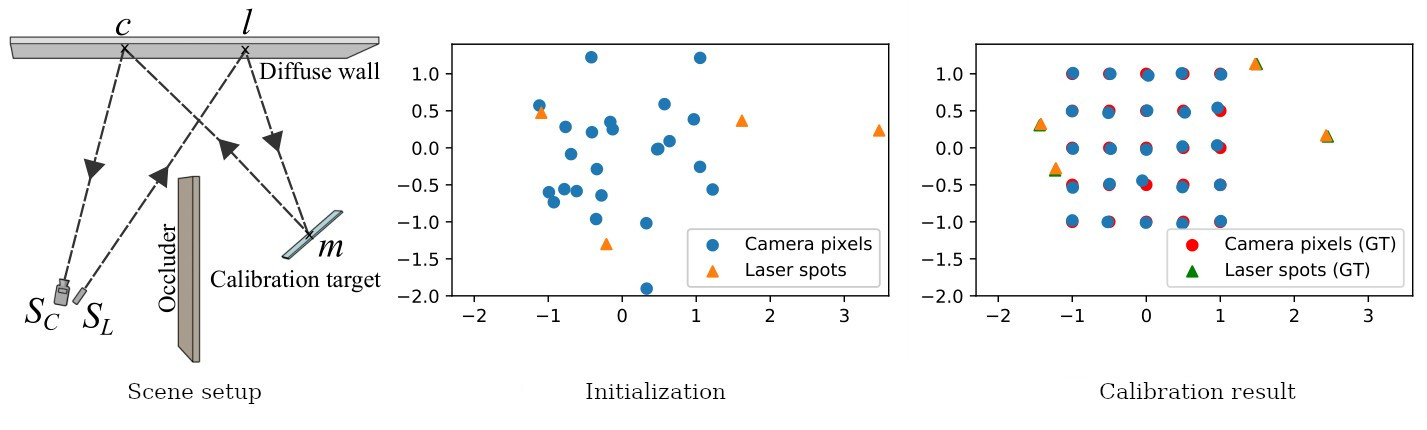
The recent years have given rise to a large number of techniques for “looking around corners”, i.e., for reconstructing or tracking occluded objects from indirect light reflections off a wall. While the direct view of cameras is routinely calibrated in computer vision applications, the calibration of non-line-of-sight setups has so far relied on manual measurement of the most important dimensions (device positions, wall position and orientation, etc.). In this paper, we propose a method for calibrating time-of-flight-based non-line-of-sight imaging systems that relies on mirrors as known targets. A roughly determined initialization is refined in order to optimize for spatio-temporal consistency. Our system is general enough to be applicable to a variety of sensing scenarios ranging from single sources/detectors via scanning arrangements to large-scale arrays. It is robust towards bad initialization and the achieved accuracy is proportional to the depth resolution of the camera system.
Paper
In: Optics Express, 2020
Link: https://www.osapublishing.org/oe/abstract.cfm?uri=oe-28-19-28324
Download:
Code
The calibration framework is written in Python and uses few external dependencies. A brief documentation and some examples are bundled.
Current version: 1.1 (19.07.2020)
Download (<1 MB)