Dr. rer. nat. Jonathan Klein

I am a research scientist in computer science / visual computing, working in the Computational Sciences Group at KAUST.
My fields of research interests include computational simulation, plant simulation and modeling, synthetic training data, machine learning architectures, none-line-of-sight imaging, and computational photography.
Publication list
My OrcID is 0000-0001-6560-0988Citation counts are available at my Google Scholar profile

Climate-based Pre-screening of Self-sustaining Regreening Opportunities in Drylands: A Case Study for Saudi Arabia




In: arXiv, 2026
@Article{FroehlichKlein2026_climate_prescreening,
author = {Katja Froehlich\textsuperscript{†} and Jonathan Klein\textsuperscript{†} and Ibrahim S. Elbasyoni and Julian D. Hunt and Yoshihide Wada and Dominik L. Michels},
title = {Climate-based Pre-screening of Self-sustaining Regreening Opportunities in Drylands: A Case Study for Saudi Arabia},
journal = {arXiv},
year = {2026},
month = {5}
doi = {10.48550/arXiv.2605.04206},
}In: arXiv, 2026
Large-scale restoration in drylands is widely promoted to address land degradation and biodiversity loss, yet many efforts rely on long-term irrigation, limiting sustainability in water-scarce regions. A key challenge is identifying locations where native vegetation can persist without intensive management while minimizing costly field campaigns. A scalable pre-screening framework is presented that integrates climate and remote sensing data to enable cost-efficient site selection in arid environments using Saudi Arabia as a case study. A Climate Suitability Score (CSS), derived from machine learning models trained on expert-curated reference sites, captures complex climatic dependencies on vegetation persistence. Using multi-year ERA5-Land data for Saudi Arabia, national-scale prediction maps are generated and combined with vegetation indices to identify areas where climate is favorable, but vegetation remains underdeveloped. Multi-criteria screening reduces candidates to thirteen priority locations. Climatically analogous intact ecosystems provide benchmarks for restoration targets and indicate that an average 2.5 fold increase in vegetation coverage is a realistic target for restoration efforts. Overall, this approach narrows the search space, reduces costs, and supports resilient ecosystem recovery planning in water-limited regions.

HYVE: Hybrid Vertex Encoder for Neural Distance Fields
In: IEEE Transactions on Visualization and Computer Graphics, 2026
@Article{Jeske2026_hyve,
author = {Jeske, Stefan R. and Klein, Jonathan and Michels, Dominik L. and Bender, Jan},
title = {HYVE: Hybrid Vertex Encoder for Neural Distance Fields},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2026},
month = {1}
doi = {10.1109/TVCG.2026.3658870},
}In: IEEE Transactions on Visualization and Computer Graphics, 2026
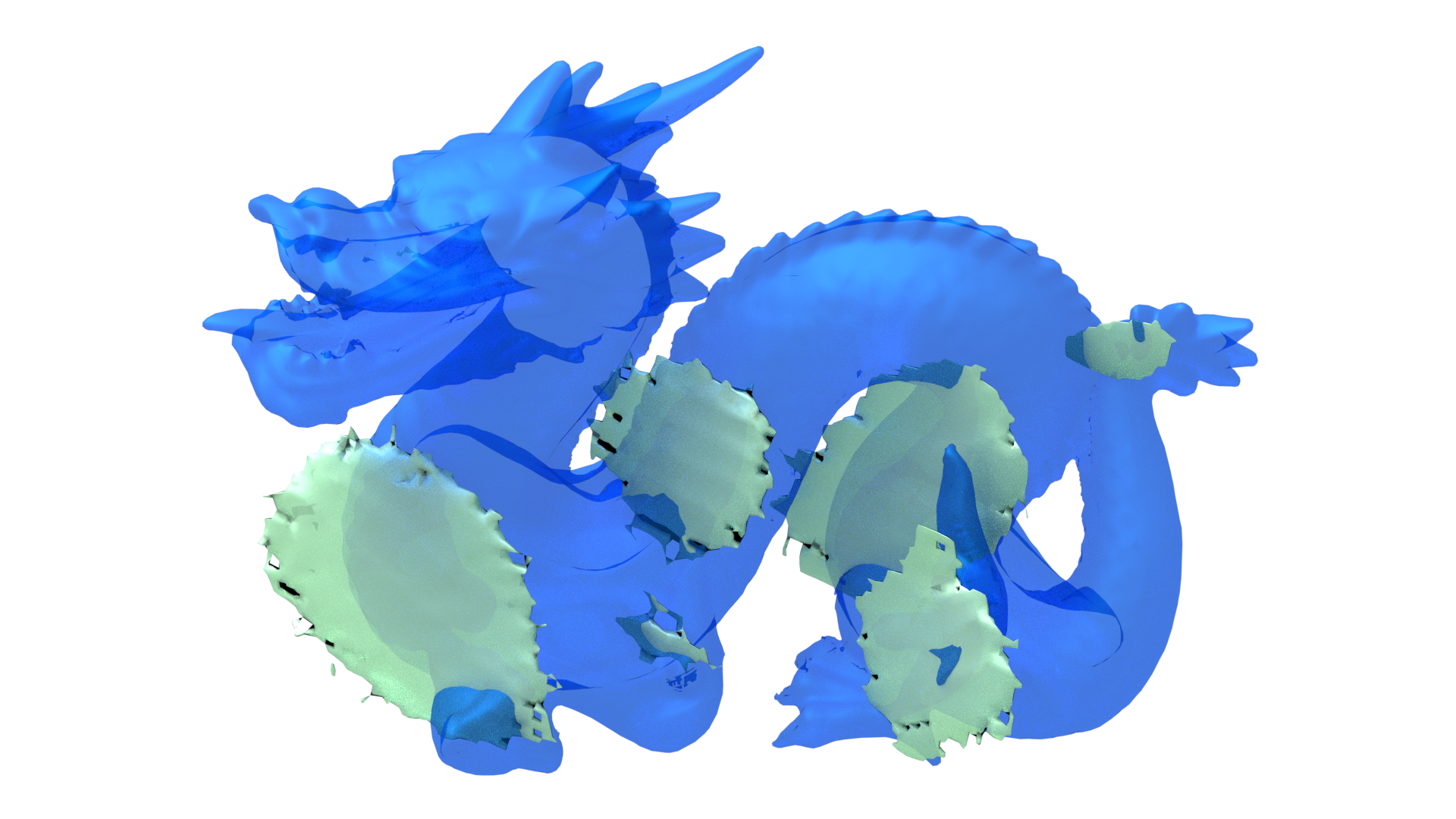
Neural shape representation generally refers to representing 3D geometry using neural networks, e.g., computing a signed distance or occupancy value at a specific spatial position. In this paper we present a neural-network architecture suitable for accurate encoding of 3D shapes in a single forward pass. Our architecture is based on a multi-scale hybrid system incorporating graph-based and voxel-based components, as well as a continuously differentiable decoder. The hybrid system includes a novel way of voxelizing point-based features in neural networks by projecting the point “feature-field” onto a grid. This projection is insensitive to local point density, and we show that it can be used to obtain smoother and more detailed reconstructions, in particular when combined with oriented point clouds as input. Our architecture also requires only a single forward pass, instead of the latent-code optimization used in auto-decoder methods. Furthermore, our network is trained to solve the well-established eikonal equation and only requires knowledge of the zero-level set for training and inference. We additionally propose a modification to the aforementioned loss function for the case that surface normals are not well defined, e.g., in the context of non-watertight surfaces and non-manifold geometry. Overall, our method consistently outperforms other baselines on the surface reconstruction task across a wide variety of datasets, while being more computationally efficient and requiring fewer parameters.

Autoregressive Generation of Static and Growing Trees
In: ACM Transactions on Graphics (SIGGRAPH Asia), 2025
@Article{Wang2025_tree_generation,
author = {Wang, Hanxiao and Zhang, Biao and Klein, Jonathan and Michels, Dominik L. and Yan, Dong-Ming and Wonka, Peter},
title = {Autoregressive Generation of Static and Growing Trees},
journal = {ACM Transactions on Graphics (SIGGRAPH Asia)},
year = {2025},
month = {12}
doi = {10.1145/3757377.3763818},
}In: ACM Transactions on Graphics (SIGGRAPH Asia), 2025
We propose a transformer architecture and training strategy for tree generation. The architecture processes data at multiple resolutions and has an hourglass shape, with middle layers processing fewer tokens than outer layers. Similar to convolutional networks, we introduce longer-range skip connections to complement this multi-resolution approach. The key advantages of this architecture are the faster processing speed and lower memory consumption. We are, therefore, able to process more complex trees than would be possible with a vanilla transformer architecture. Furthermore, we extend this approach to perform image-to-tree and point-cloud-to-tree conditional generation and to simulate the tree growth processes, generating 4D trees. Empirical results validate our approach in terms of speed, memory consumption, and generation quality.

Quasi-Symmetric Nets: A Constructive Approach to the Equimodular Elliptic Type of Kokotsakis Polyhedra
In: arXiv, 2025
@Article{Nurmatov2026_quasi_symmetric_nets,
author = {Nurmatov, Abdukhomid and Skopenkov, Mikhail and Rist, Florian and Klein, Jonathan and Michels, Dominik L.},
title = {Quasi-Symmetric Nets: A Constructive Approach to the Equimodular Elliptic Type of Kokotsakis Polyhedra},
journal = {arXiv},
year = {2025},
month = {12}
doi = {arXiv:2511.19376},
}In: arXiv, 2025
This work investigates flexible Kokotsakis polyhedra with a quadrangular base of equimodular elliptic type, filling a significant gap in the literature by providing the first explicit constructions of this type together with an explicit algebraic characterization in terms of flat and dihedral angles. A straightforwardly constructible class of polyhedra - called quasi-symmetric nets (QS-nets) - is introduced, characterized by a symmetry relation among flat angles. It is shown that every elliptic QS-net has equimodular elliptic type and is flexible in real three-dimensional Euclidean space (rather than only in complex configuration spaces), except for a few exceptional choices of dihedral angles, and that its flexion admits a closed-form parameterization. Examples are constructed that are non-self-intersecting and belong exclusively to the equimodular elliptic type. To support applications in computational geometry, a numerical pipeline is developed that searches for candidate solutions, verifies them using the explicit algebraic characterization, and constructs and visualizes the resulting polyhedra; numerical validations achieve high precision. Taken together, these results provide constructive criteria, algorithms, and validated examples for the equimodular elliptic type, enabling the design of a broad range of flexible Kokotsakis mechanisms.

FLAMEFORGE: Combustion Simulation of Wooden Structures
In: Proceedings of the ACM on Computer Graphics and Interactive Techniques (PACMCGIT), 2025
@Article{Liu2025_flameforge,
author = {Liu, Daoming and Klein, Jonathan and Rist, Florian and Pałubicki, Wojtek and Pirk, Sören and Michels, Dominik L.},
title = {FLAMEFORGE: Combustion Simulation of Wooden Structures},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques (PACMCGIT)},
year = {2025},
month = {8}
doi = {https://doi.org/10.1145/3747855},
}In: Proceedings of the ACM on Computer Graphics and Interactive Techniques (PACMCGIT), 2025
We propose a unified volumetric combustion simulator that supports general wooden structures capturing the multi-phase combustion of charring materials. Complex geometric structures can conveniently be represented in a voxel grid for the effective evaluation of volumetric effects. In addition, a signed distance field is introduced to efficiently query the surface information required to compute the insulating effect caused by the char layer. Non-charring materials such as acrylic glass or non-combustible materials such as stone can also be modeled in the simulator. Adaptive data structures are utilized to enable memory-efficient computations within our multiresolution approach. The simulator is qualitatively validated by showcasing the numerical simulation of a variety of scenes covering different kinds of structural configurations and materials. Two-way coupling of our combustion simulator and position-based dynamics is demonstrated capturing characteristic mechanical deformations caused by the combustion process. The volumetric combustion process of wooden structures is further quantitatively assessed by comparing our simulated results to sub-surface measurements of a real-world combustion experiment.

Thunderstruck: Visually Simulating Electrical Storms
In: IEEE Transactions on Visualization and Computer Graphics (TVCG), 2025
@Article{Herrera2025_thunderstruck,
author = {Amador Herrera, Jorge Alejandro and Klein, Jonathan and Banuti, Daniel T. and Pałubicki, Wojtek and Pirk, Sören and Michels, Dominik L.},
title = {Thunderstruck: Visually Simulating Electrical Storms},
journal = {IEEE Transactions on Visualization and Computer Graphics (TVCG)},
year = {2025},
month = {8}
doi = {10.1109/TVCG.2025.3596334},
}In: IEEE Transactions on Visualization and Computer Graphics (TVCG), 2025
Thunderstorms are complex multiphysics phenomena driven by charge transfer processes arising from interactions between ice and water particles in the atmosphere. We present a physically grounded model for simulating cloud electrification and lightning discharge, capable of generating diverse lightning types as emergent responses to evolving atmospheric conditions. Our approach requires only a minimal set of atmospheric parameters and no user-defined triggers. Charge separation is modeled at the microphysical level using a statistical mechanics framework, while discharges are captured through a novel gauge-invariant dielectric breakdown model that accounts for bipolar channels, dynamic electric fields, and air resistance. We validate our method through comparisons with observational data and prior models, demonstrating its ability to simulate distinct discharge types and the full life cycle of thunderstorms. Beyond scientific accuracy, our framework supports real-time nowcasting, civil engineering assessments, virtual environment generation, and the simulation of complex dielectric breakdown in varied contexts.

Harmony: A Joint Self-Supervised and Weakly-Supervised Framework for Learning General Purpose Visual Representations
In: Transactions of Machine Learning Research (TMLR), 2025
@Article{Baharoon2025_harmony,
author = {Baharoon, Mohammed and Klein, Jonathan and Michels, Dominik L.},
title = {Harmony: A Joint Self-Supervised and Weakly-Supervised Framework for Learning General Purpose Visual Representations},
journal = {Transactions of Machine Learning Research (TMLR)},
year = {2025},
month = {6}
doi = {10.48550/arXiv.2405.14239},
}In: Transactions of Machine Learning Research (TMLR), 2025
Vision-language contrastive learning frameworks like CLIP enable learning representations from natural language supervision, and provide strong zero-shot classification capabilities. However, due to the nature of the supervisory signal in these paradigms, they lack the ability to learn localized features, leading to degraded performance on dense prediction tasks like segmentation and detection. On the other hand, self-supervised learning methods have shown the ability to learn granular representations, complementing the high-level features in vision-language training. In this work, we present Harmony, a framework that combines vision-language training with discriminative and generative self-supervision to learn visual features that can be generalized across vision downstream tasks. Our framework is specifically designed to work on web-scraped data by not relying on negative examples and addressing the one-to-one correspondence issue using soft CLIP targets generated by an EMA model. We comprehensively evaluate Harmony across various vision downstream tasks and find that it significantly outperforms the baseline CLIP and the previously leading joint self and weakly-supervised methods, MaskCLIP and SLIP. Specifically, when comparing against these methods, Harmony shows superior performance in fine-tuning and zero-shot classification on ImageNet-1k, semantic segmentation on ADE20K, and both object detection and instance segmentation on MS-COCO, when pre-training a ViT-S/16 on CC3M. We also show that Harmony outperforms other self-supervised learning methods like iBOT and MAE across all tasks evaluated.

End-to-end Optimization of Fluidic Lenses
In: ACM Transactions on Graphics (SIGGRAPH Asia), 2024
@Article{Na2024_fluidic_lenses,
author = {Na, Mulun and Jiménez Romero, Hector A. and Yang, Xinge and Klein, Jonathan and Michels, Dominik L. and Heidrich, Wolfgang},
title = {End-to-end Optimization of Fluidic Lenses},
journal = {ACM Transactions on Graphics (SIGGRAPH Asia)},
year = {2024},
month = {12}
doi = {10.1145/3680528.3687584},
}In: ACM Transactions on Graphics (SIGGRAPH Asia), 2024
Prototyping and small volume production of custom imaging-grade lenses is difficult and expensive, especially for more complex aspherical shapes. Fluidic shaping has recently been proposed as a potential solution: It makes use of the atomic level smoothness of interfaces between liquids, where the shape of the interface can be carefully controlled by boundary conditions, buoyancy control and other physical parameters. If one of the liquids is a resin, its shape can be "frozen" by curing, thus creating a solid optical element. While fluidic shaping is a promising avenue, the shape space generated by this method is currently only described in the form of partial differential equations, which are incompatible with existing lens design processes. Moreover, we show that the existing PDEs are inaccurate for larger curvatures. In this work, we develop a new formulation of the shape space lenses generated by the fluidic shaping technique. It overcomes the inaccuracies of previous models, and, through a differentiable implementation, can be integrated into recent end-to-end optical design pipelines based on differentiable ray tracing. We extensively evaluate the model and the design pipeline with simulations, as well as initial physical prototypes.

DeepHadad: Enhancing Readability of Damaged Inscriptions with SyntheticData
In: ACM Journal on Computing and Cultural Heritage, 2024
@Article{Aioanei2024_deep_hadad_long,
author = {Aioanei, Andrei C. and Klein, Jonathan and Klein, Konstantin M. and Hunziker-Rodewald, Regine R. and Michels, Dominik L.},
title = {DeepHadad: Enhancing Readability of Damaged Inscriptions with SyntheticData},
journal = {ACM Journal on Computing and Cultural Heritage},
year = {2024},
month = {12}
doi = {10.1145/3727623},
}In: ACM Journal on Computing and Cultural Heritage, 2024
The deterioration of ancient inscriptions over centuries has resulted in irrevocable loss of vital written records, hampering epigraphic analysis, and creating significant gaps in historical knowledge. Factors such as eroded letters and physical damage often compromise the readability of these inscriptions. We present DeepHadad, a neural network trained on procedurally generated synthetic data that uses displacement maps and image-to-image translation to digitally restore severely damaged ancient inscriptions to a more readable state. The network's name is derived from the famous Panamuwa (I) inscription on the mid-8th century BCE Hadad statue, where, at certain places, only faint traces of letters remain on the damaged basalt statue. A key challenge in this work is the lack of well-preserved and damaged glyph pairs for training, as each glyph instance is unique and therefore not found in different states of erosion. We address this by generating synthetic training data through simulated erosion processes, enabling our neural network to successfully generalize to real data. By extracting and overlaying completion maps onto the 3D model, we significantly enhance the legibility of the barely recognizable Aramaic inscription on the Hadad statue. Quantitative and qualitative experiments confirm that our approach can recover textual content that would otherwise be lost or recoverable only through time-consuming manual work. This research opens a pioneering avenue for employing state-of-the-art artificial intelligence (AI) to enrich the readability of ancient textual heritage. Our methodology facilitates a more comprehensive analysis of significant inscriptions and demonstrates the potential of AI-assistive technologies to advance the field of ancient restoration and epigraphic studies.

Synthetic Data at Scale: A Development Model to Efficiently Leverage Machine Learning in Agriculture
In: Frontiers in Plant Science, 2024
@Article{Klein2024_synthetic_data,
author = {Klein, Jonathan and Waller, Rebekah E. and Pirk, Sören and Pałubicki, Wojtek and Tester, Mark and Michels, Dominik L.},
title = {Synthetic Data at Scale: A Development Model to Efficiently Leverage Machine Learning in Agriculture},
journal = {Frontiers in Plant Science},
year = {2024},
month = {9}
doi = {10.3389/fpls.2024.1360113},
}In: Frontiers in Plant Science, 2024
The rise of artificial intelligence (AI) and in particular modern machine learning (ML) algorithms during the last decade has been met with great interest in the agricultural industry. While undisputedly powerful, their main drawback remains the need for sufficient and diverse training data. The collection of real datasets and their annotation are the main cost drivers of ML developments, and while promising results on synthetically generated training data have been shown, their generation is not without difficulties on their own. In this paper, we present a development model for the iterative, cost-efficient generation of synthetic training data. Its application is demonstrated by developing a low-cost early disease detector for tomato plants (Solanum lycopersicum) using synthetic training data. A neural classifier is trained by exclusively using synthetic images, whose generation process is iteratively refined to obtain optimal performance. In contrast to other approaches that rely on a human assessment of similarity between real and synthetic data, we instead introduce a structured, quantitative approach. Our evaluation shows superior generalization results when compared to using non-task-specific real training data and a higher cost efficiency of development compared to traditional synthetic training data. We believe that our approach will help to reduce the cost of synthetic data generation in future applications.
A Lennard-Jones Layer for Distribution Normalization
In: Transactions on Machine Learning Research (JMLR), 2024
@Article{Na2024_lennard_jones,
author = {Na, Mulun and Klein, Jonathan and Zhang, Biao and Pałubicki, Wojtek and Pirk, Sören and Michels, Dominik L.},
title = {A Lennard-Jones Layer for Distribution Normalization},
journal = {Transactions on Machine Learning Research (JMLR)},
year = {2024},
month = {8}
doi = {10.48550/arXiv.2402.03287},
}In: Transactions on Machine Learning Research (JMLR), 2024
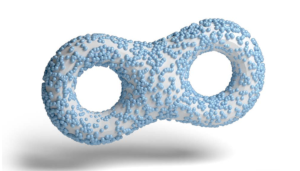
We introduce the Lennard-Jones layer (LJL) for the equalization of the density of 2D and 3D point clouds through systematically rearranging points without destroying their overall structure (distribution normalization). LJL simulates a dissipative process of repulsive and weakly attractive interactions between individual points by considering the nearest neighbor of each point at a given moment in time. This pushes the particles into a potential valley, reaching a well-defined stable configuration that approximates an equidistant sampling after the stabilization process. We apply LJLs to redistribute randomly generated point clouds into a randomized uniform distribution. Moreover, LJLs are embedded in the generation process of point cloud networks by adding them at later stages of the inference process. The improvements in 3D point cloud generation utilizing LJLs are evaluated qualitatively and quantitatively. Finally, we apply LJLs to improve the point distribution of a score-based 3D point cloud denoising network. In general, we demonstrate that LJLs are effective for distribution normalization which can be applied at negligible cost without retraining the given neural network.

Cyclogenesis: Simulating Hurricanes and Tornadoes
In: ACM Transactions on Graphics (SIGGRAPH), 2024
@Article{Herrera2024_cyclogenesis,
author = {Amador Herrera, Jorge Alejandro and Klein, Jonathan and Liu, Daoming and Pałubicki, Wojtek and Pirk, Sören and Michels, Dominik L.},
title = {Cyclogenesis: Simulating Hurricanes and Tornadoes},
journal = {ACM Transactions on Graphics (SIGGRAPH)},
year = {2024},
month = {7}
doi = {10.1145/3658149},
}In: ACM Transactions on Graphics (SIGGRAPH), 2024
Cyclones are large-scale phenomena that result from complex heat and water transfer processes in the atmosphere, as well as from the interaction of multiple hydrometeors, i.e., water and ice particles. When cyclones make landfall, they are considered natural disasters and spawn dread and awe alike. We propose a physically-based approach to describe the 3D development of cyclones in a visually convincing and physically plausible manner. Our approach allows us to capture large-scale heat and water continuity, turbulent microphysical dynamics of hydrometeors, and mesoscale cyclonic processes within the planetary boundary layer. Modeling these processes enables us to simulate multiple hurricane and tornado phenomena. We evaluate our simulations quantitatively by comparing to real data from storm soundings and observations of hurricane landfall from climatology research. Additionally, qualitative comparisons to previous methods are performed to validate the different parts of our scheme. In summary, our model simulates cyclogenesis in a comprehensive way that allows us to interactively render animations of some of the most complex weather events.

Gazebo Plants: Simulating Plant-Robot Interaction with Cosserat Rods
In: Robotics and Sustainability at IEEE International Conference on Robotics and Automation (ICRA), 2024
@Article{Deng2024_gazebo_plants,
author = {Deng, Junchen and Marri, Samhita and Klein, Jonathan and Pałubicki, Wojtek and Pirk, Sören and Chowdhary, Girish and Michels, Dominik L.},
title = {Gazebo Plants: Simulating Plant-Robot Interaction with Cosserat Rods},
journal = {Robotics and Sustainability at IEEE International Conference on Robotics and Automation (ICRA)},
year = {2024},
month = {5}
doi = {10.48550/arXiv.2402.02570},
}In: Robotics and Sustainability at IEEE International Conference on Robotics and Automation (ICRA), 2024
Robotic harvesting has the potential to positively impact agricultural productivity, reduce costs, improve food quality, enhance sustainability, and to address labor shortage. In the rapidly advancing field of agricultural robotics, the necessity of training robots in a virtual environment has become essential. Generating training data to automatize the underlying computer vision tasks such as image segmentation, object detection and classification, also heavily relies on such virtual environments as synthetic data is often required to overcome the shortage and lack of variety of real data sets. However, physics engines commonly employed within the robotics community, such as ODE, Simbody, Bullet, and DART, primarily support motion and collision interaction of rigid bodies. This inherent limitation hinders experimentation and progress in handling non-rigid objects such as plants and crops. In this contribution, we present a plugin for the Gazebo simulation platform based on Cosserat rods to model plant motion. It enables the simulation of plants and their interaction with the environment. We demonstrate that, using our plugin, users can conduct harvesting simulations in Gazebo by simulating a robotic arm picking fruits and achieve results comparable to real-world experiments.
Neural Inverse Procedural Modeling of Knitting Yarns from Images
In: Computers & Graphics, 2024
@Article{Trunz2023_inverse_yarns,
author = {Trunz, Elena and Klein, Jonathan and Müller, Jan and Bode, Lukas and Sarlette, Ralf and Weinmann, Michael and Klein, Reinhard},
title = {Neural Inverse Procedural Modeling of Knitting Yarns from Images},
journal = {Computers & Graphics},
year = {2024},
month = {2}
doi = {10.1016/j.cag.2023.12.013},
}In: Computers & Graphics, 2024
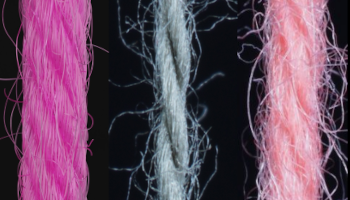
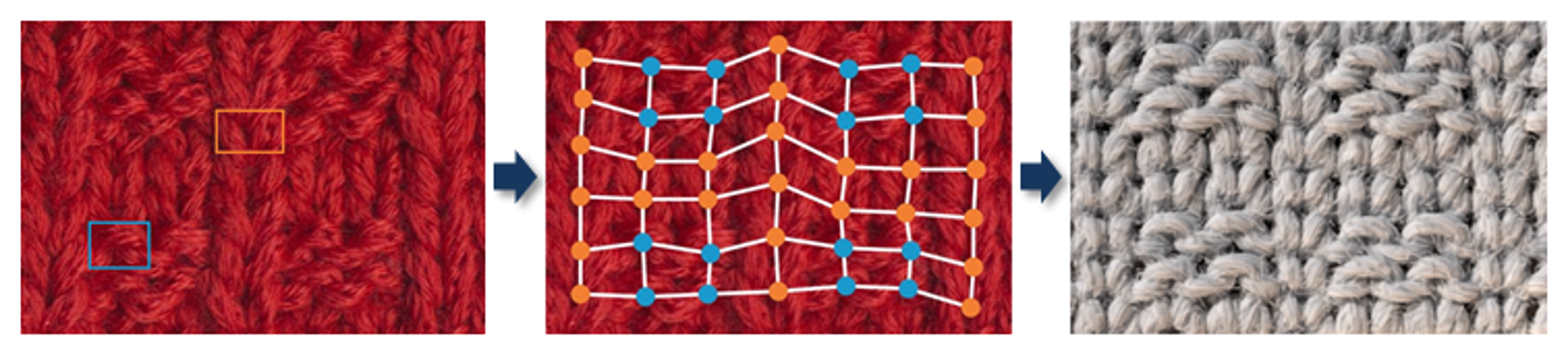
We investigate the capabilities of neural inverse procedural modeling to infer high-quality procedural yarn models with fiber-level details from single images of depicted yarn samples. While directly inferring all parameters of the underlying yarn model based on a single neural network may seem an intuitive choice, we show that the complexity of yarn structures in terms of twisting and migration characteristics of the involved fibers can be better encountered in terms of ensembles of networks that focus on individual characteristics. We analyze the effect of different loss functions including a parameter loss to penalize the deviation of inferred parameters to ground truth annotations, a reconstruction loss to enforce similar statistics of the image generated for the estimated parameters in comparison to training images as well as an additional regularization term to explicitly penalize deviations between latent codes of synthetic images and the average latent code of real images in the latent space of the encoder. We demonstrate that the combination of a carefully designed parametric, procedural yarn model with respective network ensembles as well as loss functions even allows robust parameter inference when solely trained on synthetic data. Since our approach relies on the availability of a yarn database with parameter annotations and we are not aware of such a respectively available dataset, we additionally provide, to the best of our knowledge, the first dataset of yarn images with annotations regarding the respective yarn parameters. For this purpose, we use a novel yarn generator that improves the realism of the produced results over previous approaches.

A Physically-inspired Approach to the Simulation of Plant Wilting
In: ACM Transactions on Graphics (SIGGRAPH), 2023
@Article{Maggioli2023_plant_wilting,
author = {Maggioli, Filippo and Klein, Jonathan and Hädrich, Torsten and Rodolà, Emanuele and Pałubicki, Wojtek and Pirk, Sören and Michels, Dominik L.},
title = {A Physically-inspired Approach to the Simulation of Plant Wilting},
journal = {ACM Transactions on Graphics (SIGGRAPH)},
year = {2023},
month = {12}
doi = {10.1145/3610548.3618218},
}In: ACM Transactions on Graphics (SIGGRAPH), 2023
Plants are among the most complex objects to be modeled in computer graphics. While a large body of work is concerned with structural modeling and the dynamic reaction to external forces, our work focuses on the dynamic deformation caused by plant internal wilting processes. To this end, we motivate the simulation of water transport inside the plant which is a key driver of the wilting process. We then map the change of water content in individual plant parts to branch stiffness values and obtain the wilted plant shape through a position based dynamics simulation. We show, that our approach can recreate measured wilting processes and does so with a higher fidelity than approaches ignoring the internal water flow. Realistic plant wilting is not only important in a computer graphics context but can also aid the development of machine learning algorithms in agricultural applications through the generation of synthetic training data.

Rhizomorph: The Coordinated Function of Shoots and Roots
In: ACM Transaction on Graphics (SIGGRAPH), 2023
@Article{Li2023_rhizomorph,
author = {Li, Bosheng and Klein, Jonathan and Michels, Dominik L. and Pirk, Sören and Benes, Bedrich and Pałubicki, Wojtek},
title = {Rhizomorph: The Coordinated Function of Shoots and Roots},
journal = {ACM Transaction on Graphics (SIGGRAPH)},
year = {2023},
month = {8}
doi = {10.1145/3592145},
}In: ACM Transaction on Graphics (SIGGRAPH), 2023
Computer graphics has dedicated a considerable amount of effort to generating realistic models of trees and plants. Many existing methods leverage procedural modeling algorithms - that often consider biological findings - to generate branching structures of individual trees. While the realism of tree models generated by these algorithms steadily increases, most approaches neglect to model the root system of trees. However, the root system not only adds to the visual realism of tree models but also plays an important role in the development of trees. In this paper, we advance tree modeling in the following ways: First, we define a physically-plausible soil model to simulate resource gradients, such as water and nutrients. Second, we propose a novel developmental procedural model for tree roots that enables us to emergently develop root systems that adapt to various soil types. Third, we define long-distance signaling to coordinate the development of shoots and roots. We show that our advanced procedural model of tree development enables - for the first time - the generation of trees with their root systems.
Learning to Reconstruct Botanical Trees from Single Images
In: ACM Transactions on Graphics (SIGGRAPH Asia), 2021
@Article{Li2021_reconstruct_trees,
author = {Li, Bosheng and Kałużny, Jacek and Klein, Jonathan and Michels, Dominik L. and Pałubicki, Wojtek and Benes, Bedrich and Pirk, Sören},
title = {Learning to Reconstruct Botanical Trees from Single Images},
journal = {ACM Transactions on Graphics (SIGGRAPH Asia)},
year = {2021},
month = {12}
doi = {10.1145/3478513.3480525},
}In: ACM Transactions on Graphics (SIGGRAPH Asia), 2021
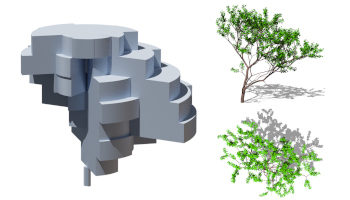
We introduce a novel method for reconstructing the 3D geometry of botanical trees from single photographs. Faithfully reconstructing a tree from single-view sensor data is a challenging and open problem because many possible 3D trees exist that fit the tree's shape observed from a single view. We address this challenge by defining a reconstruction pipeline based on three neural networks. The networks simultaneously mask out trees in input photographs, identify a tree's species, and obtain its 3D radial bounding volume - our novel 3D representation for botanical trees. Radial bounding volumes (RBV) are used to orchestrate a procedural model primed on learned parameters to grow a tree that matches the main branching structure and the overall shape of the captured tree. While the RBV allows us to faithfully reconstruct the main branching structure, we use the procedural model's morphological constraints to generate realistic branching for the tree crown. This constraints the number of solutions of tree models for a given photograph of a tree. We show that our method reconstructs various tree species even when the trees are captured in front of complex backgrounds. Moreover, although our neural networks have been trained on synthetic data with data augmentation, we show that our pipeline performs well for real tree photographs. We evaluate the reconstructed geometries with several metrics, including leaf area index and maximum radial tree distances.

Domain Adaptation with Morphologic Segmentation
In: Autonomous Driving: Perception, Prediction and Planning (ADP3) at IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021
@Article{Klein2021_eps,
author = {Klein, Jonathan and Pirk, Sören and Michels, Dominik L.},
title = {Domain Adaptation with Morphologic Segmentation},
journal = {Autonomous Driving: Perception, Prediction and Planning (ADP3) at IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2021},
month = {6}
}In: Autonomous Driving: Perception, Prediction and Planning (ADP3) at IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021
We present a novel domain adaptation framework that uses morphologic segmentation to translate images from arbitrary input domains (real and synthetic) into a uniform output domain. Our framework is based on an established image-to-image translation pipeline that allows us to first transform the input image into a generalized representation that encodes morphology and semantics - the edge-plus-segmentation map (EPS) - which is then transformed into an output domain. Images transformed into the output domain are photo-realistic and free of artifacts that are commonly present across different real (e.g. lens flare, motion blur, etc.) and synthetic (e.g. unrealistic textures, simplified geometry, etc.) data sets. Our goal is to establish a preprocessing step that unifies data from multiple sources into a common representation that facilitates training downstream tasks in computer vision. This way, neural networks for existing tasks can be trained on a larger variety of training data, while they are also less affected by overfitting to specific data sets. We showcase the effectiveness of our approach by qualitatively and quantitatively evaluating our method on four data sets of simulated and real data of urban scenes.
A Calibration Scheme for Non-Line-of-Sight Imaging Setups
In: Optics Express, 2020
@Article{Klein2020_nlos_calibration,
author = {Klein, Jonathan and Laurenzis, Martin and Hullin, Matthias B. and Iseringhausen, Julian},
title = {A Calibration Scheme for Non-Line-of-Sight Imaging Setups},
journal = {Optics Express},
year = {2020},
month = {0}
doi = {10.1364/OE.398647},
}In: Optics Express, 2020
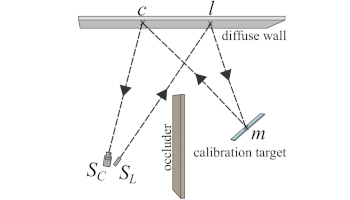
The recent years have given rise to a large number of techniques for “looking around corners”, i.e., for reconstructing or tracking occluded objects from indirect light reflections off a wall. While the direct view of cameras is routinely calibrated in computer vision applications, the calibration of non-line-of-sight setups has so far relied on manual measurement of the most important dimensions (device positions, wall position and orientation, etc.). In this paper, we propose a method for calibrating time-of-flight-based non-line-of-sight imaging systems that relies on mirrors as known targets. A roughly determined initialization is refined in order to optimize for spatio-temporal consistency. Our system is general enough to be applicable to a variety of sensing scenarios ranging from single sources/detectors via scanning arrangements to large-scale arrays. It is robust towards bad initialization and the achieved accuracy is proportional to the depth resolution of the camera system.
Approaches to solve inverse problems for optical sensing around corners
In: SPIE Security + defense: Emerging Imaging and Sensing Technologies for Security and Defence IV, 2019
@Article{Laurenzis2019_inverse_sensing,
author = {Laurenzis, Martin and Klein, Jonathan and Bacher, Emmanuel and Schertzer, Stephane},
title = {Approaches to solve inverse problems for optical sensing around corners},
journal = {SPIE Security + defense: Emerging Imaging and Sensing Technologies for Security and Defence IV},
year = {2019},
month = {0}
}In: SPIE Security + defense: Emerging Imaging and Sensing Technologies for Security and Defence IV, 2019
Optically non-line-of-sight sensing or seeing around the corner is a computational imaging approach describing a classical inverse problem where information about a hidden scene has to be reconstructed from a set of indirect measurements. In the last decade, this field has been intensively studied by different groups, using several sensory and reconstruction approaches. We focus on active sensing with two main concepts: The reconstruction of reflective surfaces by back-projection of time-of-flight data and a six degree-of-freedom tracking of a rigid body from intensity images using an analysis-by-synthesis method. In the first case, the inverse problem can be approximately solved by back-projection of the transient data to obtain a geometrical shape of the hidden scene. Using intensity images, only the diffusely reflected blurred intensity distribution and no time information is recorded. This problem can be solved by an analysis-of-synthesis approach.
Inverse Procedural Modeling of Knitwear
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019
@Article{Trunz2019_procedural_knitwear,
author = {Trunz, Elena and Merzbach, Sebastian and Klein, Jonathan and Schulze, Thomas and Weinmann, Michael and Klein, Reinhard},
title = {Inverse Procedural Modeling of Knitwear},
journal = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2019},
month = {0}
}In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019
The analysis and modeling of cloth has received a lot of attention in recent years. While recent approaches are focused on woven cloth, we present a novel practical approach for the inference of more complex knitwear structures as well as the respective knitting instructions from only a single image without attached annotations. Knitwear is produced by repeating instances of the same pattern, consisting of grid-like arrangements of a small set of basic stitch types. Our framework addresses the identification and localization of the occurring stitch types, which is challenging due to huge appearance variations. The resulting coarsely localized stitch types are used to infer the underlying grid structure as well as for the extraction of the knitting instruction of pattern repeats, taking into account principles of Gestalt theory. Finally, the derived instructions allow the reproduction of the knitting structures, either as renderings or by actual knitting, as demonstrated in several examples.
A Quantitative Platform for Non-Line-of-Sight Imaging Problems
In: British Machine Vision Conference (BMVC), 2018
@Article{Klein2018_nlos_benchmark,
author = {Klein, Jonathan and Laurenzis, Martin and Michels, Dominik L. and Hullin, Matthias B.},
title = {A Quantitative Platform for Non-Line-of-Sight Imaging Problems},
journal = {British Machine Vision Conference (BMVC)},
year = {2018},
month = {0}
}In: British Machine Vision Conference (BMVC), 2018
The computational sensing community has recently seen a surge of works on imaging beyond the direct line of sight. However, most of the reported results rely on drastically different measurement setups and algorithms, and are therefore hard to impossible to compare quantitatively. In this paper, we focus on an important class of approaches, namely those that aim to reconstruct scene properties from time-resolved optical impulse responses. We introduce a collection of reference data and quality metrics that are tailored to the most common use cases, and we define reconstruction challenges that we hope will aid the development and assessment of future methods.
Wenn eine Wand kein Hindernis mehr ist
In: photonik, 2017
@Article{Klein2017_photonik,
author = {Klein, Jonathan and Laurenzis, Martin and Hullin, Matthias B.},
title = {Wenn eine Wand kein Hindernis mehr ist},
journal = {photonik},
year = {2017},
month = {5}
}In: photonik, 2017
Ein noch sehr junges Teilgebiet der Computer-Vision beschäftigt sich mit der Lokalisierung und Verfolgung von Objekten, die sich nicht im direkten Sichtfeld einer Kamera befinden. Bisher waren dazu teure Spezialkameras und Laserbeleuchter mit einer hohen zeitlichen Auflösung erforderlich. Ein neuer Ansatz löst dieses Problem nun mit handelsüblicher Hardware.
Transient light imaging laser radar with advanced sensing capabilities: reconstruction of arbitrary light in flight path and sensing around a corner
In: SPIE Laser Radar Technology and Applications, 2017
@Article{Laurenzis2017_transient_light,
author = {Laurenzis, Martin and Klein, Jonathan and Christnacher, Frank},
title = {Transient light imaging laser radar with advanced sensing capabilities: reconstruction of arbitrary light in flight path and sensing around a corner},
journal = {SPIE Laser Radar Technology and Applications},
year = {2017},
month = {5}
doi = {10.1117/12.2261961},
}In: SPIE Laser Radar Technology and Applications, 2017
Laser radars are widely used for laser detection and ranging in a wide field of application scenarios. In the recent past, new sensing capabilities by transient light imaging have been demonstrated enabling imaging of light pulses during flight and the estimation of position and shape of targets outside the direct field of view. High sensitive imaging sensors are available give the chance to detect laser pulse in flight which are sparsely scattered in air. Theory and experimental investigation of arbitrary light propagation paths show the possibility to reconstruct the light path trajectory. This result could enable the remote localization of laser sources which will become an important reconnaissance task in future scenarios. Further, transient light imaging can reveal information about objects outside the direct field of view or hidden behind an obscuration by computational imaging. In this talk, we present different approaches to realize transient light imaging (e.g. time correlated single photon counting) and their application for relativistic imaging, real-time non-line of sight tracking and reconstruction of hidden scenes.
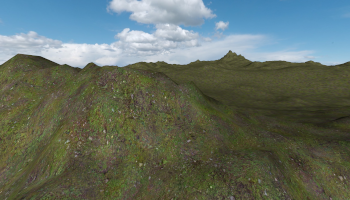
Multi-Scale Terrain Texturing using Generative Adversarial Networks
In: IEEE Conference on Image and Vision Computing New Zealand (IVCNZ), 2017
@Article{Klein2017_terrain_texturing,
author = {Klein, Jonathan and Hartmann, Stefan and Weinmann, Michael and Michels, Dominik L.},
title = {Multi-Scale Terrain Texturing using Generative Adversarial Networks},
journal = {IEEE Conference on Image and Vision Computing New Zealand (IVCNZ)},
year = {2017},
month = {0}
}In: IEEE Conference on Image and Vision Computing New Zealand (IVCNZ), 2017
We propose a novel, automatic generation process for detail maps that allows the reduction of tiling artifacts in real-time terrain rendering. This is achieved by training a generative adversarial network (GAN) with a single input texture and subsequently using it to synthesize a huge texture spanning the whole terrain. The low-frequency components of the GAN output are extracted, down-scaled and combined with the high-frequency components of the input texture during rendering. This results in a terrain texture that is both highly detailed and non-repetitive, which eliminates the tiling artifacts without decreasing overall image quality. The rendering is efficient regarding both memory consumption and computational costs. Furthermore, it is orthogonal to other techniques for terrain texture improvements such as texture splatting and can directly be combined with them.
Non-line-of-sight MoCap
In: ACM SIGGRAPH Emerging Technologies, 2017
@Article{Klein2017_nlos_mocap,
author = {Klein, Jonathan and Peters, Christoph and Laurenzis, Martin and Hullin, Matthias B.},
title = {Non-line-of-sight MoCap},
journal = {ACM SIGGRAPH Emerging Technologies},
year = {2017},
month = {0}
}In: ACM SIGGRAPH Emerging Technologies, 2017
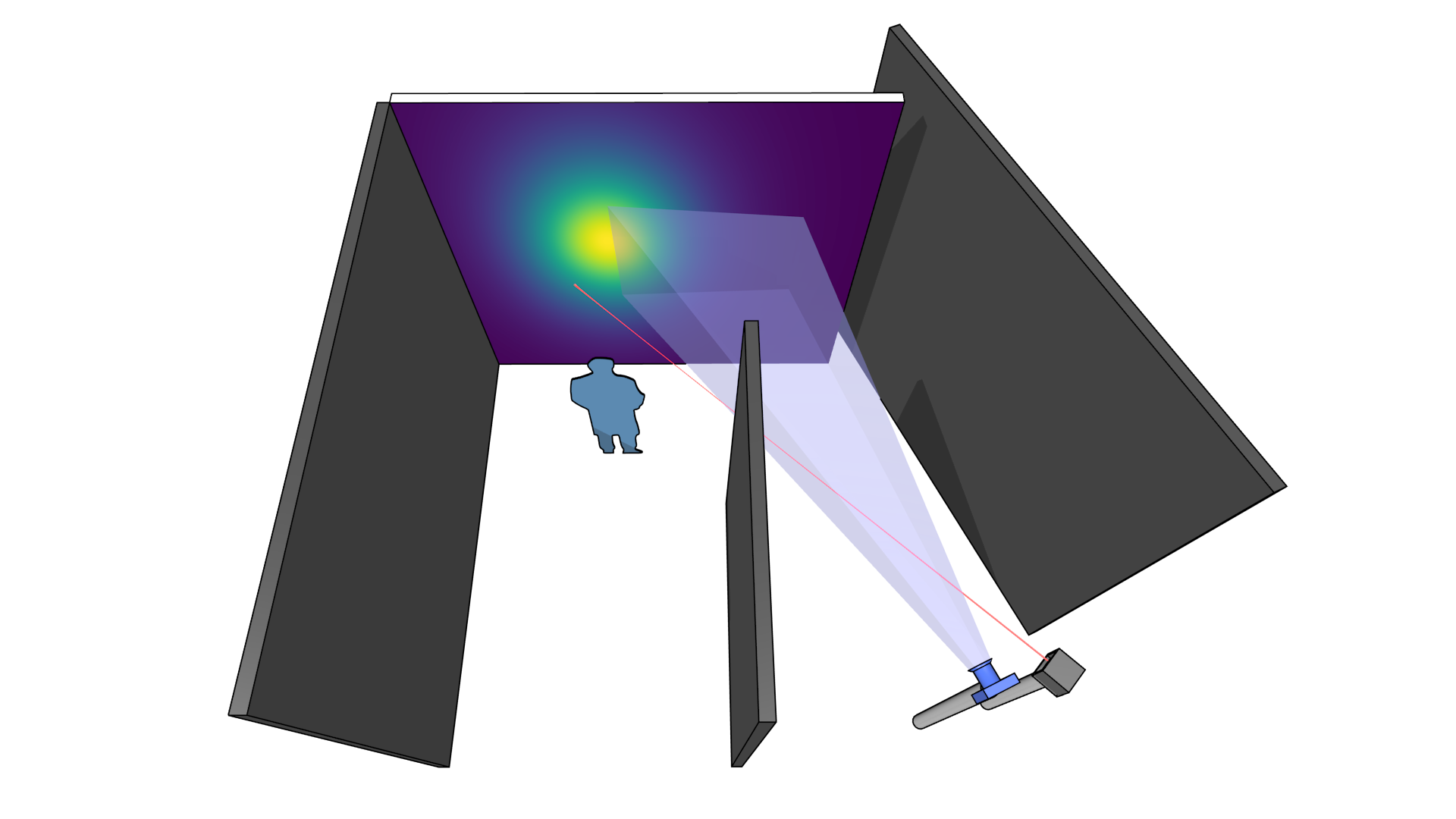
The sensing of objects hidden behind an occluder is a fascinating emerging area of research and expected to have an impact in numerous application fields such as automobile safety, remote observation or endoscopy. In the past, this problem has consistently been solved with the use of expensive time-of-flight technology and often required a long reconstruction time. Our system is the first one that only relies on off-the-shelf intensity cameras and lasers. To achieve this, we developed a novel analysis-by-synthesis scheme which utilizes the output of a specialized renderer as input to an optimizer to perform the reconstruction. In the exhibition, visitors can freely move the object around in the hidden scene, while our camera setup on the other side of the wall reconstructs the object position and orientation in real time. We hope that this first hand experience will spread excitement about possible future applications of this new technology.
Dual-mode optical sensing: three-dimensional imaging and seeing around a corner
In: SPIE Optical Engineering, 2017
@Article{Laurenzis2017_dualmode_sensing,
author = {Laurenzis, Martin and Velten, Andreas and Klein, Jonathan},
title = {Dual-mode optical sensing: three-dimensional imaging and seeing around a corner},
journal = {SPIE Optical Engineering},
year = {2017},
month = {0}
}In: SPIE Optical Engineering, 2017
The application of nonline-of-sight (NLoS) vision and seeing around a corner has been demonstrated in the recent past on a laboratory level with round trip path lengths on the scale of 1 m as well as 10 m. This method uses a computational imaging approach to analyze the scattered information of objects which are hidden from the sensor’s direct field of view. A detailed knowledge about the scattering surfaces is necessary for the analysis. The authors evaluate the realization of dual-mode concepts with the aim of collecting all necessary information to enable both the direct three-dimensional imaging of a scene as well as the indirect sensing on hidden objects. Two different sensing approaches, laser gated viewing (LGV) and time-correlated single-photon counting, are investigated operating at laser wavelengths of 532 and 1545 nm, respectively. While LGV sensors have high spatial resolution, their application for NLoS sensing suffers from a low temporal resolution, i.e., a minimal gate width of 2 ns. On the other hand, Geiger-mode single-photon counting devices have high temporal resolution (250 ps), but the array size is limited to some thousand sensor elements. The authors present detailed theoretical and experimental evaluations of both sensing approaches.
Tracking objects outside the line of sight using 2D intensity images
In: Scientific Reports, 2016
@Article{Klein2016_nlos_tracking,
author = {Klein, Jonathan and Peters, Christoph and Mart\'in, Jaime and Laurenzis, Martin and Hullin, Matthias B.},
title = {Tracking objects outside the line of sight using 2D intensity images},
journal = {Scientific Reports},
year = {2016},
month = {8}
doi = {10.1038/srep32491},
}In: Scientific Reports, 2016
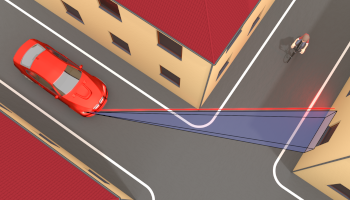
The observation of objects located in inaccessible regions is a recurring challenge in a wide variety of important applications. Recent work has shown that using rare and expensive optical setups, indirect diffuse light reflections can be used to reconstruct objects and two-dimensional (2D) patterns around a corner. Here we show that occluded objects can be tracked in real time using much simpler means, namely a standard 2D camera and a laser pointer. Our method fundamentally differs from previous solutions by approaching the problem in an analysis-by-synthesis sense. By repeatedly simulating light transport through the scene, we determine the set of object parameters that most closely fits the measured intensity distribution. We experimentally demonstrate that this approach is capable of following the translation of unknown objects, and translation and orientation of a known object, in real time.
Relativistic effects in imaging of light in flight with arbitrary paths
In: Optics Letters, 2016
@Article{Laurenzis2016_imaging_light,
author = {Laurenzis, Martin and Klein, Jonathan and Bacher, Emmanuel},
title = {Relativistic effects in imaging of light in flight with arbitrary paths},
journal = {Optics Letters},
year = {2016},
month = {5}
}In: Optics Letters, 2016
Direct observation of light in flight is enabled by recent avalanche photodiode arrays, which have the capability for time-correlated single photon counting. In contrast to classical imaging, imaging of light in flight depends on the relative sensor position, which is studied in detail by measurement and analysis of light pulses propagating at different angles. The time differences of arrival are analyzed to determine the propagation angle and distance of arbitrary light paths. Further analysis of the apparent velocity shows that light pulses can appear to travel at superluminal or subluminal apparent velocities.
Transient Imaging for Real-Time Tracking Around a Corner
In: SPIE Electro-Optical Remote Sensing, 2016
@Article{Klein2016_transient_tracking,
author = {Klein, Jonathan and Laurenzis, Martin and Hullin, Matthias B.},
title = {Transient Imaging for Real-Time Tracking Around a Corner},
journal = {SPIE Electro-Optical Remote Sensing},
year = {2016},
month = {0}
}In: SPIE Electro-Optical Remote Sensing, 2016
Non-line-of-sight imaging is a fascinating emerging area of research and expected to have an impact in numerous application fields including civilian and military sensing. Performance of human perception and situational awareness can be extended by the sensing of shapes and movement around a corner in future scenarios. Rather than seeing through obstacles directly, non-line-of-sight imaging relies on analyzing indirect reflections of light that traveled around the obstacle. In previous work, transient imaging was established as the key mechanic to enable the extraction of useful information from such reflections. So far, a number of different approaches based on transient imaging have been proposed, with back projection being the most prominent one. Different hardware setups were used for the acquisition of the required data, however all of them have severe drawbacks such as limited image quality, long capture time or very high prices. In this paper we propose the analysis of synthetic transient renderings to gain more insights into the transient light transport. With this simulated data, we are no longer bound to the imperfect data of real systems and gain more flexibility and control over the analysis. In a second part, we use the insights of our analysis to formulate a novel reconstruction algorithm. It uses an adapted light simulation to formulate an inverse problem which is solved in an analysis-by-synthesis fashion. Through rigorous optimization of the reconstruction, it then becomes possible to track known objects outside the line of side in real time. Due to the forward formulation of the light transport, the algorithm is easily expandable to more general scenarios or different hardware setups. We therefore expect it to become a viable alternative to the classic back projection approach in the future.
Sensing and reconstruction of arbitrary light-in-flight paths by a relativistic imaging approach
In: SPIE, 2016
@Article{Laurenzis2016_relativistic_imaging,
author = {Laurenzis, Martin and Klein, Jonathan and Bacher, Emmanuel and Metzger, Nicolas and Christnacher, Frank},
title = {Sensing and reconstruction of arbitrary light-in-flight paths by a relativistic imaging approach},
journal = {SPIE},
year = {2016},
month = {0}
}In: SPIE, 2016
Transient light imaging is an emerging technology and interesting sensing approach for fundamental multidisciplinary research ranging from computer science to remote sensing. Recent developments in sensor technologies and computational imaging has made this emerging sensing approach a candidate for next generation sensor systems with rapidly increasing maturity but still relay on laboratory technology demonstrations. At ISL, transient light sensing is investigated by time correlated single photon counting (TCSPC). An eye-safe shortwave infrared (SWIR) TCSPC setup, consisting of an avalanche photodiode array and a pulsed fiber laser source, is used to investigate sparsely scattered light while propagating through air. Fundamental investigation of light in flight are carried out with the aim to reconstruct the propagation path of arbitrary light paths. Light pulses are observed in flight at various propagation angles and distances. As demonstrated, arbitrary light paths can be distinguished due to a relativistic effect leading to a distortion of temporal signatures. A novel method analyzing the time difference of arrival (TDOA) is carried out to determine the propagation angle and distance with respect to this relativistic effect. Based on our results, the performance of future laser warning receivers can be improved by the use of single photon counting imaging devices. They can detect laser light even when the laser does not directly hit the sensor or is passing at a certain distance.
Material Classification Using Raw Time-of-Flight Measurements
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016
@Article{Su2016_tof_classification,
author = {Su, Shuochen and Heide, Felix and Swanson, Robin and Klein, Jonathan and Callenberg, Clara and Hullin, Matthias B. and Heidrich, Wolfgang},
title = {Material Classification Using Raw Time-of-Flight Measurements},
journal = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2016},
month = {0}
}In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016
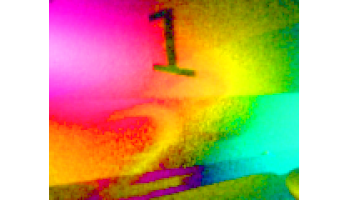
We propose a material classification method using raw time-of-flight (ToF) measurements. ToF cameras capture the correlation between a reference signal and the temporal response of material to incident illumination. Such measurements encode unique signatures of the material, i.e. the degree of subsurface scattering inside a volume. Subsequently, it offers an orthogonal domain of feature representation compared to conventional spatial and angular reflectance-based approaches. We demonstrate the effectiveness, robustness, and efficiency of our method through experiments and comparisons of real-world materials.
Solving Trigonometric Moment Problems for Fast Transient Imaging
In: ACM Transactions on Graphics (SIGGRAPH Asia), 2015
@Article{Peters2015_trigonometric_moments,
author = {Peters, Christoph and Klein, Jonathan and Hullin, Matthias B. and Klein, Reinhard},
title = {Solving Trigonometric Moment Problems for Fast Transient Imaging},
journal = {ACM Transactions on Graphics (SIGGRAPH Asia)},
year = {2015},
month = {11}
doi = {10.1145/2816795.2818103},
}In: ACM Transactions on Graphics (SIGGRAPH Asia), 2015
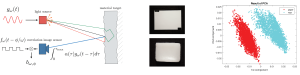
Transient images help to analyze light transport in scenes. Besides two spatial dimensions, they are resolved in time of flight. Cost-efficient approaches for their capture use amplitude modulated continuous wave lidar systems but typically take more than a minute of capture time. We propose new techniques for measurement and reconstruction of transient images, which drastically reduce this capture time. To this end, we pose the problem of reconstruction as a trigonometric moment problem. A vast body of mathematical literature provides powerful solutions to such problems. In particular, the maximum entropy spectral estimate and the Pisarenko estimate provide two closed-form solutions for reconstruction using continuous densities or sparse distributions, respectively. Both methods can separate m distinct returns using measurements at m modulation frequencies. For m = 3 our experiments with measured data confirm this. Our GPU-accelerated implementation can reconstruct more than 100000 frames of a transient image per second. Additionally, we propose modifications of the capture routine to achieve the required sinusoidal modulation without increasing the capture time. This allows us to capture up to 18.6 transient images per second, leading to transient video. An important byproduct is a method for removal of multipath interference in range imaging.
Multiple-return single-photon counting of light in flight and sensing of non-line-of-sight objects at shortwave infrared wavelengths
In: Optics Letters, 2015
@Article{Laurenzis2015_spad,
author = {Laurenzis, Martin and Klein, Jonathan and Bacher, Emmanuel and Metzger, Nicolas},
title = {Multiple-return single-photon counting of light in flight and sensing of non-line-of-sight objects at shortwave infrared wavelengths},
journal = {Optics Letters},
year = {2015},
month = {10}
doi = {10.1364/OL.40.004815},
}In: Optics Letters, 2015
Time-of-flight sensing with single-photon sensitivity enables new approaches for the localization of objects outside a sensor's field of view by analyzing backscattered photons. In this Letter, the authors have studied the application of Geiger-mode avalanche photodiode arrays and eye-safe infrared lasers, and provide experimental data of the direct visualization of backscattering light in flight, and direct vision and indirect vision of targets in line-of-sight and non-line-of-sight configurations at shortwave infrared wavelengths.
Study of single photon counting for non-line-of-sight vision
In: SPIE, 2015
@Article{Laurenzis2015_photon_counting,
author = {Laurenzis, Martin and Christnacher, Frank and Klein, Jonathan and Hullin, Matthias B. and Velten, Andreas},
title = {Study of single photon counting for non-line-of-sight vision},
journal = {SPIE},
year = {2015},
month = {0}
doi = {10.1117/12.2179559},
}In: SPIE, 2015
The application of non-line-of-sight vision has been demonstrated in the recent past on laboratory level with round trip path lengths on the scale of 1 m as well as 10 m. This method uses a computational imaging approach to analyze the scattered information of objects which are hidden from the direct sensor field of view. In the present work, the authors evaluate the application of recent single photon counting devices for non-line-of-sight sensing and give predictions on range and resolution. Further, the realization of a concept is studied enabling the indirect view on a hidden scene. Different approaches based on ICCD and GM-APD or SPAD sensor technologies are reviewed. Recent laser gated viewing sensors have a minimal temporal resolution of around 2 ns due to sensor gate widths. Single photon counting devices have higher sensitivity and higher temporal resolution.
Academic Career
Research Scientist (since 2023)
working with Prof. Dr. Dominik L. Michels in the Computational Sciences Group at KAUST
working with Prof. Dr. Dominik L. Michels in the Computational Sciences Group at KAUST
Post Doc (started 2022)
working with Prof. Dr. Dominik L. Michels in the Computational Sciences Group at KAUST
working with Prof. Dr. Dominik L. Michels in the Computational Sciences Group at KAUST
PhD (finished 2021)
supervised by Prof. Dr. Matthias B. Hullin at the Institute for Computer Science II / Computer Graphics, University of Bonn
Computational Non-Line-of-Sight Imaging
supervised by Prof. Dr. Matthias B. Hullin at the Institute for Computer Science II / Computer Graphics, University of Bonn
Master of Science (finished 2014)
Master thesis on
supervised by Prof. Dr. Andreas Kolb at the Computer Graphics and Multimedia Systems Group, University of Siegen
Master thesis on
Correction of Multipath-Effects in Time-of-Flight Range Data
supervised by Prof. Dr. Andreas Kolb at the Computer Graphics and Multimedia Systems Group, University of Siegen
Bachelor of Science (finished 2012)
Bachelor thesis on
supervised by Prof. Dr. Andreas Kolb at the Computer Graphics and Multimedia Systems Group, University of Siegen
Bachelor thesis on
Terrain Shading
supervised by Prof. Dr. Andreas Kolb at the Computer Graphics and Multimedia Systems Group, University of Siegen