Tracking objects outside the line of sight using 2D intensity images
Jonathan Klein, Christoph Peters, Jaime Martín, Martin Laurenzis, and Matthias B. Hullin
Abstract
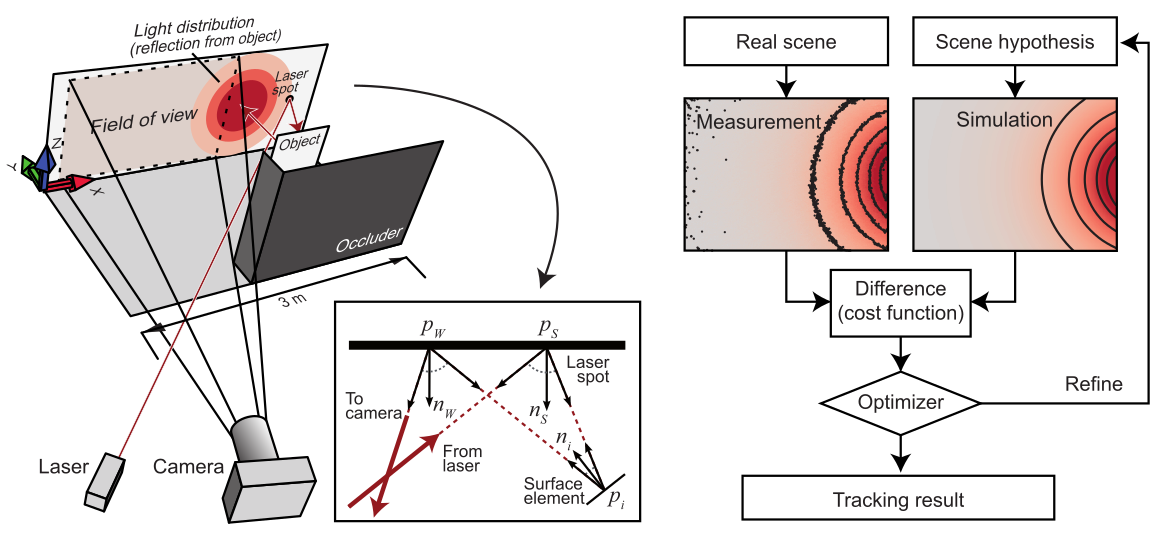
The observation of objects located in inaccessible regions is a recurring challenge in a wide variety of important applications. Recent work has shown that using rare and expensive optical setups, indirect diffuse light reflections can be used to reconstruct objects and two-dimensional (2D) patterns around a corner. Here we show that occluded objects can be tracked in real time using much simpler means, namely a standard 2D camera and a laser pointer. Our method fundamentally differs from previous solutions by approaching the problem in an analysis-by-synthesis sense. By repeatedly simulating light transport through the scene, we determine the set of object parameters that most closely fits the measured intensity distribution. We experimentally demonstrate that this approach is capable of following the translation of unknown objects, and translation and orientation of a known object, in real time.
Paper
In: Scientific Reports, 2016
Link: http://www.nature.com/articles/srep32491
Download:
Video
A video showing our real-time tracking system in action (no audio): Download (~5 MB)
Citation
@Article{Klein2016_nlos_tracking,
author = {Klein, Jonathan and Peters, Christoph and Mart\'in, Jaime and Laurenzis, Martin and Hullin, Matthias B.},
title = {Tracking objects outside the line of sight using 2D intensity images},
journal = {Scientific Reports},
year = {2016},
month = {8}
doi = {10.1038/srep32491},
}